SVA-CS2-24
Servo Motor
A servo motor is different from a DC motor because it can’t turn all the way around. Instead it can sweep between 0 and 180 degrees. But it can be controlled to rotate to a specific angle and are fairly precise.
Setup
You will need to add a new library to the pico.
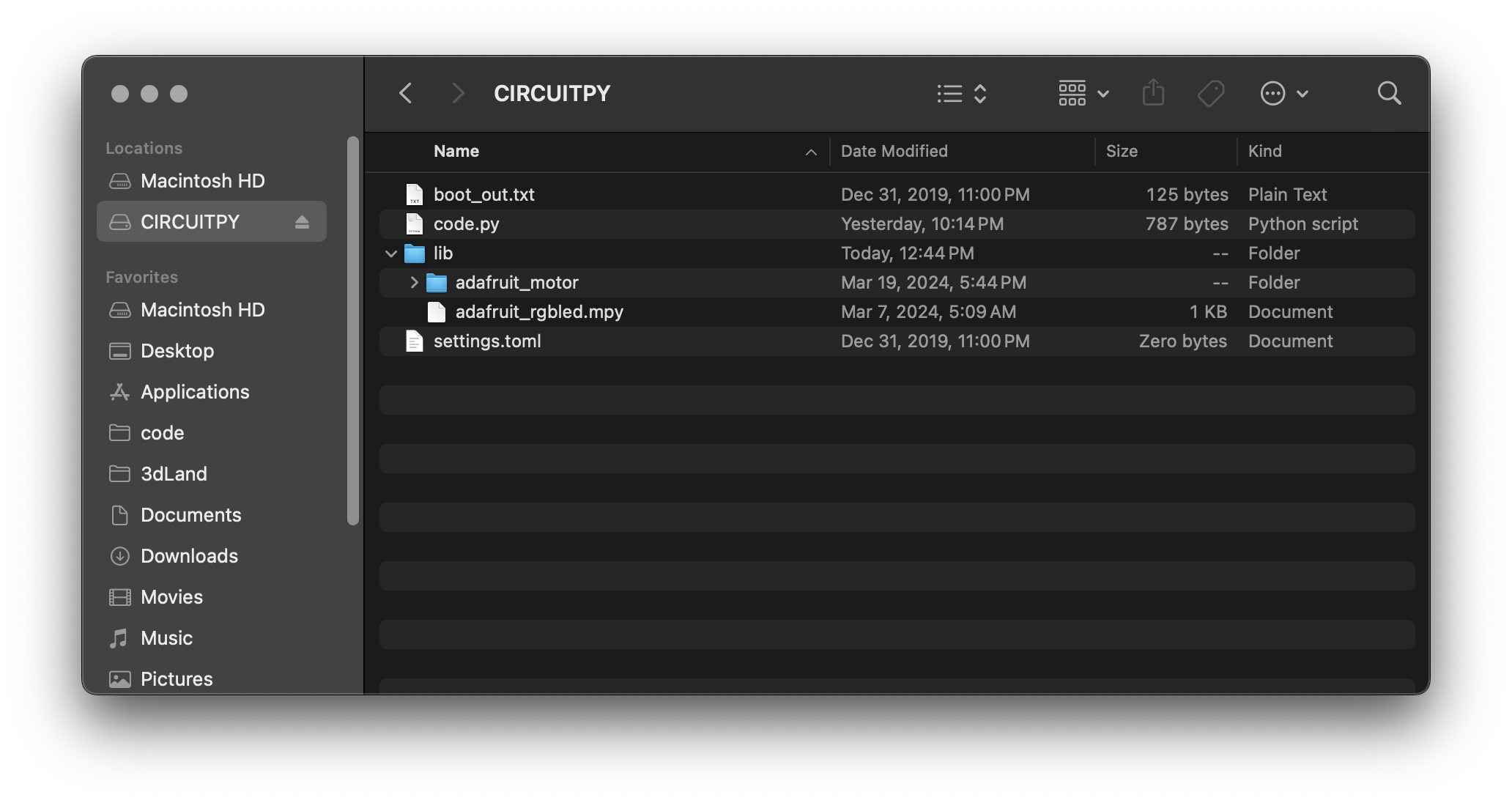
Getting the Library
There is a adafruit library that makes it easier to control and RGB led. Download bundle and unzip.
Find the folder adafruit_motor and copy the entire folder to the lib folder on the pico. This will restart the pico.
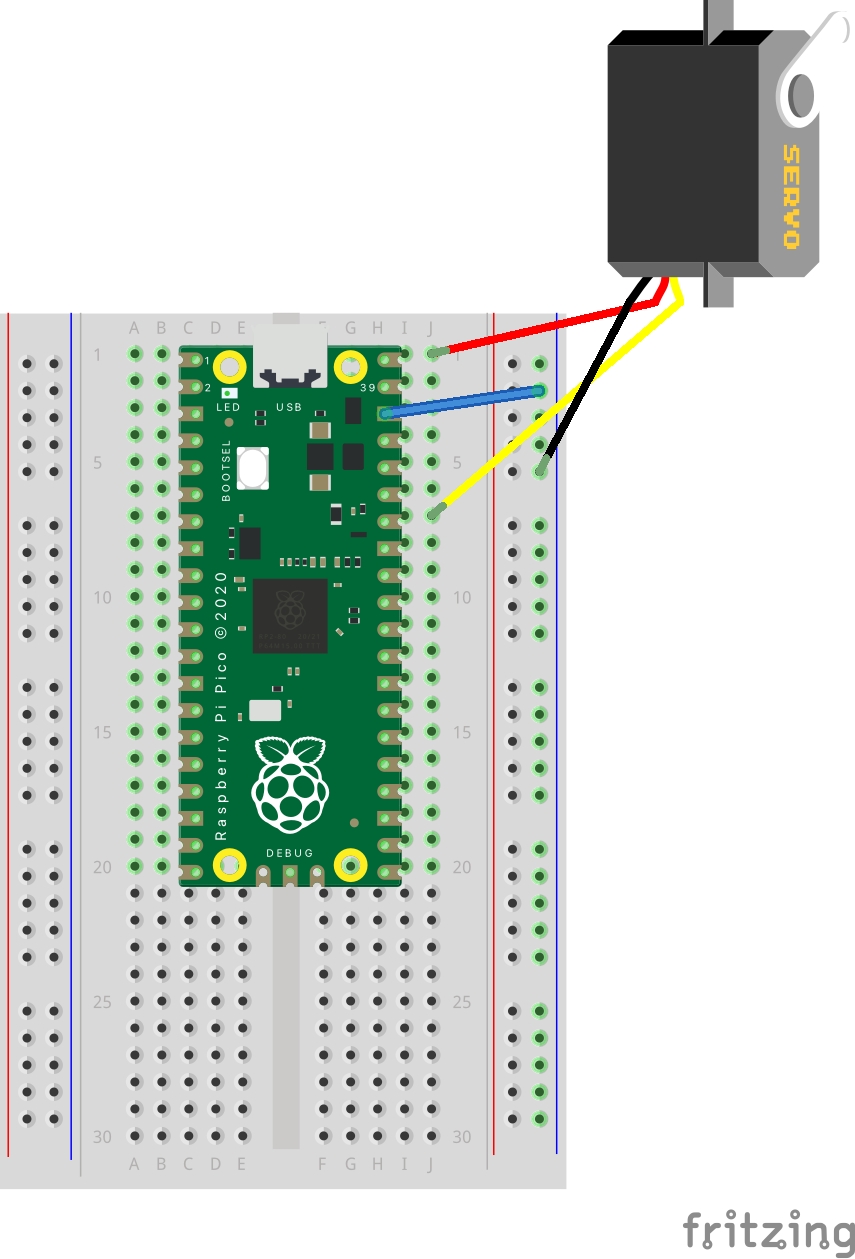
Circuit
- Red Servo cable (+) to 5V pin
- Black Servo cable (-) to ground
- Yellow Servo Cable to Pin 28
Code
import time
import board
from digitalio import DigitalInOut, Direction, Pull
import pwmio
from adafruit_motor import servo
print("servo test program")
# Servo setup
pwm_servo = pwmio.PWMOut(board.GP28, duty_cycle=2 ** 15, frequency=50)
servo1 = servo.Servo(
pwm_servo, min_pulse=500, max_pulse=2200
) # tune pulse for specific servo
# Two function definitions for servo tests
# Servo test
def servo_direct_test():
print("servo test: 90")
servo1.angle = 90
time.sleep(2)
print("servo test: 0")
servo1.angle = 0
time.sleep(2)
print("servo test: 90")
servo1.angle = 90
time.sleep(2)
print("servo test: 180")
servo1.angle = 180
time.sleep(2)
# Servo smooth test
def servo_smooth_test():
print("servo smooth test: 180 - 0, -1º steps")
for angle in range(180, 0, -1): # 180 - 0 degrees, -1º at a time.
servo1.angle = angle
time.sleep(0.01)
time.sleep(1)
print("servo smooth test: 0 - 180, 1º steps")
for angle in range(0, 180, 1): # 0 - 180 degrees, 1º at a time.
servo1.angle = angle
time.sleep(0.01)
time.sleep(1)
# main loop
while True:
# uncomment to run a test
servo_direct_test()
#servo_smooth_test()